Semi-autonomous Roundabout project
The objective of this project is to design a roundabout system that is collision-free, alive, and adapting to the presence of human drivers. This project starts Summer 2009!
References: Papers and Matlab Code
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="ea54f93e52b7dff1-ed13085a-41c14a00-ba669c8d-17487b772e4ce74cf77db613"><ac:plain-text-body><![CDATA[Collision Avoidance Algorithm with a Human-driven Vehicle [[12 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2009/CA-human.pdf]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="bb6962ddf1b0c8ca-a3656f9e-49454ff2-8690a531-844878ad9e4461fd3552df6f"><ac:plain-text-body><![CDATA[Collision Avoidance with a Human-driven Vehicle Matlab Code by Rajeev Verma [[13 | http://www.umich.edu/%7Erajverma/code.zip]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="24fcbbec3c476d23-65b2ac18-4e164ef1-a2a7b608-906bc4d6892c630eb1fb1ed6"><ac:plain-text-body><![CDATA[Kick-off meeting presentation (May 15 2009) [[14 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2009/pres.ppt]]
Semi-autonomous System Movie-December 2010 By Rajeev Verma.
]]></ac:plain-text-body></ac:structured-macro>
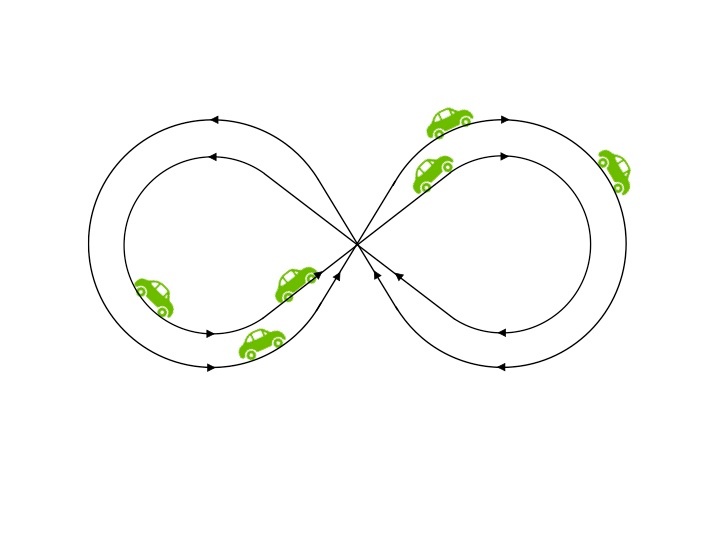
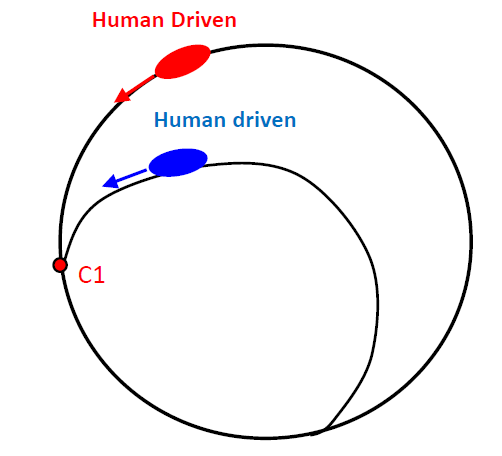
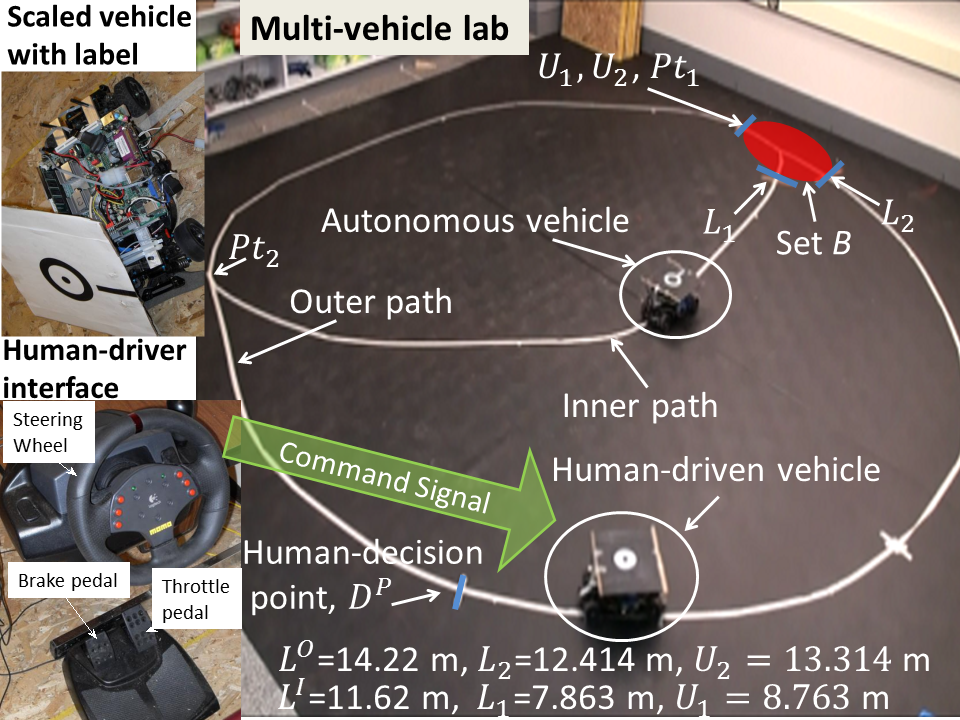
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="c9c6392a12b5ae31-696e17e0-4a9e4479-99bda612-52d3ec4d460b13d26bb99bf1"><ac:plain-text-body><![CDATA[In the movie, the human-driven vehicle runs on the outer loop and it is remotely controlled by a human subject from the remote human control station (showed on the right). The autonomous vehicle runs on the intermediate loop. Its task is to (1) predict the intent of the human driven vehicle and (2) on the basis of this belief, apply the least conservative control action to prevent a collision. This problem was formulated as a control problem with imperfect mode information for hybrid automata. To see how we solved this problem, check this paper by Rajeev Verma [[15 | http://www.eecs.umich.edu/%7Eddv/papers/CDC_09_rv_ddv.pdf]] (CDC 2009)
]]></ac:plain-text-body></ac:structured-macro>
|
| Widget Connector |
|---|
| url | http://www.youtube.com/watch?v=-fUzTTiaRvc |
|---|
|
 |
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="7cd2b5b989329e22-eff3b3f4-41dc4f1c-b3379788-acec70c1ee49c9623f1cc402"><ac:plain-text-body><![CDATA[ | Three-Vehicle Movie-September 2009 [Demo | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2009/8_28_09_demo_clip.avi] or alternate link on youtube [[9 | http://www.youtube.com/watch?v=_NrKShBqd18]] By Jeffrey Michael Duperret
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="d4f1d46b72eb24a6-6619dca9-43104f0a-861a9b58-ed3fc3303175c58453f89370"><ac:plain-text-body><![CDATA[In the movie, Vehicle 3 and Vehicle 1 employ the collision avoidance algorithm relying to the capture sets as shown above to prevent the collision at C1. Vehicle 2 and Vehicle 3 apply the same algorithm to prevent the collision at C2. When Vehicle 3 and Vehicle 1 or Vehicle 2 and Vehicle 3 are on the common traits, they implement a rear-end collision avoidance routine. The system is safe and live by design. For more information on the algorithms, see the publications [[10 | http://www.eecs.umich.edu/%7Eddv/papers/ACC09.pdf]] (ACC 2009) and [[11 | http://www.eecs.umich.edu/%7Eddv/papers/HafnerCDC2009.pdf]] (CDC 2009). | | Widget Connector |
|---|
| url | http://www.youtube.com/watch?v=_NrKShBqd18 |
|---|
|
| ]]></ac:plain-text-body></ac:structured-macro> |
Autonomous Roundabout project
This Project started during summer 2008. It was lead by a group of undergraduate students.
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="1ad8ef1ff455c29b-67c34e24-44ab4ca0-88938978-eac5061168ebb7f3f931afcc"><ac:plain-text-body><![CDATA[Project Introduction, Algorithms, and Tasks [[2 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/ProjectIntroAndAlgorithms.ppt]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="ff660519a3aa7058-2070daa0-4c6c4b3f-ab3ab178-f8c08b4135594c497bcc4fd1"><ac:plain-text-body><![CDATA[Project Time Management (May-Mid June) [[3 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/TimeManagementMay-June.ppt]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="ea8e24afe832a176-02ef1e62-47004730-9d269682-edbf3191753cc4d99be4e00b"><ac:plain-text-body><![CDATA[Vehicle Software Architecture [[4 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/VehicleSoftwareArch.ppt]]
]]></ac:plain-text-body></ac:structured-macro>
Undergrad Students: Vishnu Desaraju, Mark Yang, Hyun Chul Rho, Stephanie Roth, Edwin Tay, Jeffrey Duperret
References: Papers and code for CA and vehicle dynamics
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="8156604633b3c286-83176064-4adb42bb-8584ba74-dea63af0853a1cbd48139d52"><ac:plain-text-body><![CDATA[Collision Avoidance Algorithm (CA) [[5 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/CA.pdf]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="14825706ed473b08-49508ba9-44704c09-a875bd66-e8616f08db35b985cf4baf86"><ac:plain-text-body><![CDATA[Collision Avoidance Matlab Code by Rajeev Verma [[6 | http://www.umich.edu/%7Erajverma/CA.zip]]
]]></ac:plain-text-body></ac:structured-macro>
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="c6d614b606bab492-8aa80a4e-456e4264-89c4b8ec-c27544c31d79e4036e79b5e1"><ac:plain-text-body><![CDATA[Vehicle Dynamics [[7 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/Dynamics.pdf]] | !scaledvehcile.jpg | width=542,height=320,align=center! | ]]></ac:plain-text-body></ac:structured-macro> |
<ac:structured-macro ac:name="unmigrated-wiki-markup" ac:schema-version="1" ac:macro-id="d199a960e31aa8dd-c426b473-45424667-8a3fa0c4-a88278ede5a30f9501ee70af"><ac:plain-text-body><![CDATA[ | Final Project Report--September 2008 [[8 | http://www.eecs.umich.edu/%7Eddv/LAB/RoundAbout2008/Report-Summer2008.pdf]] (This appeared as a paper in the 2009 ICRA conference)
]]></ac:plain-text-body></ac:structured-macro>
Final Movie-September 2008 Final Demo Movie By Vishnu Desaraju. In the movie, we show the experimentally obtained trajectory of the vehicles compared against the capture sets, which we implemented using our partial order-based algorithms. These algorithms have linear complexity in the size of the system state space as they exploit the rich partial order structure that characterizes traffic systems. | | Widget Connector |
|---|
| url | http://www.youtube.com/watch?v=3uCfduRWjMo |
|---|
|
|