...
We
...
are
...
currently
...
testing
...
algorithms
...
for
...
cooperative
...
collision
...
avoidance
...
at
...
traffic
...
mergings,
...
roundabouts,
...
and
...
intersections.
...
We
...
consider
...
both
...
completely
...
autonomous
...
systems
...
and
...
partially
...
autonomous
...
ones.
...
In
...
partially
...
autonomous
...
systems,
...
some
...
of
...
the
...
vehicles
...
are
...
human-driven
...
and
...
do
...
not
...
communicate
...
with
...
the
...
autonomous
...
vehicles.
...
We
...
model
...
the
...
behavior
...
of
...
human
...
driven
...
vehicles
...
as
...
a
...
hybrid
...
automaton
...
so
...
that
...
it
...
can
...
be
...
formally
...
taken
...
into
...
account
...
by
...
the
...
automatic
...
controllers.
...
Challenges
...
that
...
we
...
tackle
...
include:
...
incorporation
...
of
...
human
...
driving
...
models,
...
hybrid
...
continuous/discrete
...
dynamics,
...
state
...
(continuous/discrete)
...
uncertainty,
...
and
...
complexity
...
arising
...
from
...
large
...
state
...
spaces.
...
Besides
...
our
...
in-lab
...
implementation,
...
we
...
work
...
with
...
engineers
...
at
...
the
...
Toyota
...
Technical
...
Center,
...
Ann
...
Arbor
...
to
...
implement
...
our
...
algorithms
...
on
...
their
...
full-scale
...
experimental
...
facility. 
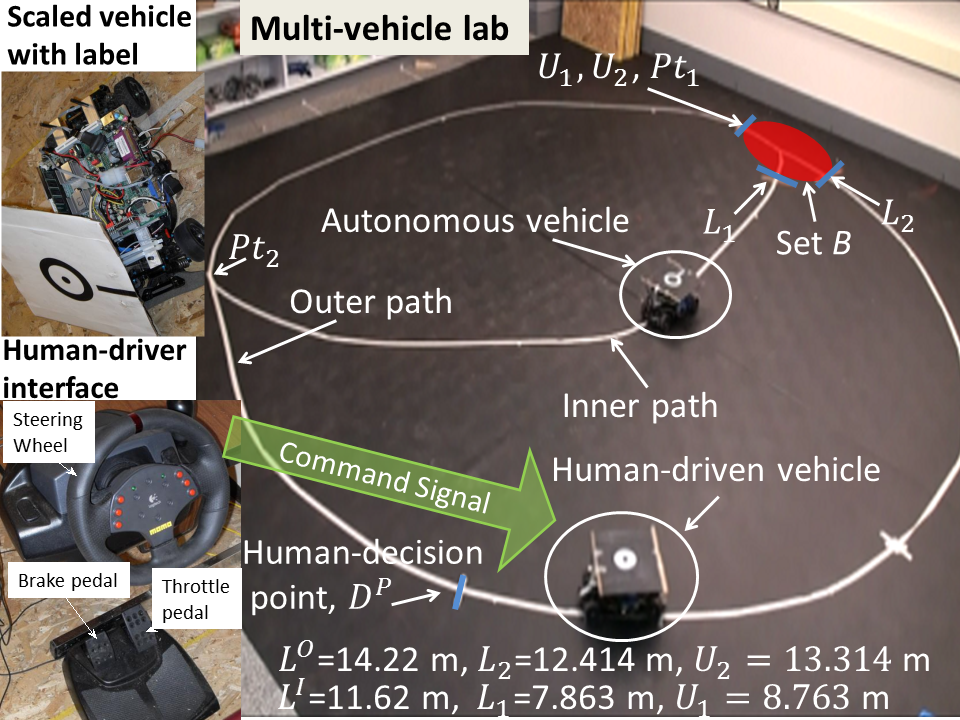
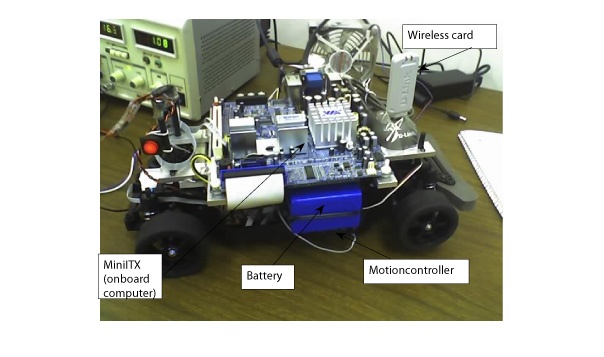
Our Vehicles
Our vehicles (shown in the figures) are equipped with on-board computer (running Linux, Fedora core), wireless communication (802.11b),
...
positioning
...
system
...
(overhead
...
b/w
...
camera
...
vision
...
system),
...
and
...
speed
...
sensors
...
(encoders).
...
A
...
motion
...
controller
...
emulates
...
the
...
scaled
...
longitudinal
...
dynamics
...
of
...
a
...
full-scale
...
vehicle
...
including
...
engine
...
and
...
transmission.
...
The
...
on-board
...
computer
...
can
...
apply
...
steering,
...
throttle,
...
and
...
braking
...
inputs.
...
The
...
dynamic
...
response
...
of
...
the
...
vehicles
...
to
...
these
...
inputs
...
is
...
the
...
same
...
as
...
the
...
one
...
of
...
a
...
full
...
scale
...
vehicle
...
with
...
automatic
...
transmission.
...
The
...
test
...
area
...
is
...
6
...
by
...
6
...
meters.
...
The
...
vehicles
...
are
...
about
...
30
...
cm
...
long.
...
For
...
more
...
details
...
on
...
how
...
the
...
hardware
...
and
...
the
...
software
...
of
...
the
...
vehicles
...
was
...
designed,
...
refer
...
to
...
[
...
...
]
...
(IEEE/ASME
...
Trans.
...
Mechatronics,
...
2008).
...
Multivehicle |
...
collision |
...
avoidance |
...
project |
...
|
...
is |
...
a |
...
currently |
...
active |
...
project. | |
Human warning/override |
...
system |
...
project | | ||||
Extension of Semi-autonomous Roundabout project | | ||||
Semi-autonomous Roundabout project |
|
...
| ||
Three-Vehicle |
...
Movie-September |
...
2009 |
...
...
or |
...
alternate |
...
link |
...
on |
...
youtube |
...
[9 |
...
] |
...
By |
...
Jeffrey |
...
Michael |
...
Duperret |
...
|
...
the |
...
movie, |
...
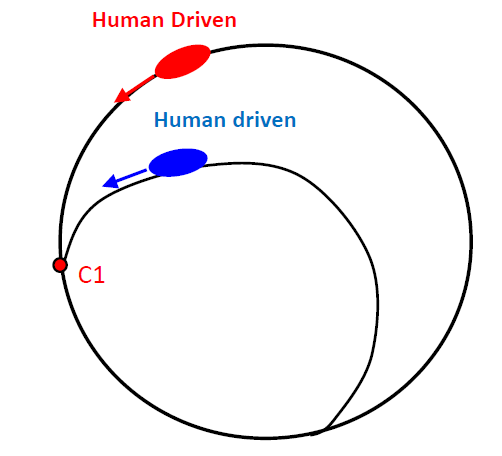
Vehicle |
...
3 |
...
and |
...
Vehicle |
...
1 |
...
employ |
...
the |
...
collision |
...
avoidance |
...
algorithm |
...
relying |
...
to |
...
the |
...
capture |
...
sets |
...
as |
...
shown |
...
above |
...
to |
...
prevent |
...
the |
...
collision |
...
at |
...
C1. |
...
Vehicle |
...
2 |
...
and |
...
Vehicle |
...
3 |
...
apply |
...
the |
...
same |
...
algorithm |
...
to |
...
prevent |
...
the |
...
collision |
...
at |
...
C2. |
...
When |
...
Vehicle |
...
3 |
...
and |
...
Vehicle |
...
1 |
...
or |
...
Vehicle |
...
2 |
...
and |
...
Vehicle |
...
3 |
...
are |
...
on |
...
the |
...
common |
...
traits, |
...
they |
...
implement |
...
a |
...
rear-end |
...
collision |
...
avoidance |
...
routine. |
...
The |
...
system |
...
is |
...
safe |
...
and |
...
live |
...
by |
...
design. |
...
For |
...
more |
...
information |
...
on |
...
the |
...
algorithms, |
...
see |
...
the |
...
publications |
...
[ |
...
...
] |
...
(ACC |
...
2009) |
...
and |
...
[11 |
...
] |
...
(CDC |
...
2009). |
...
|
...
Autonomous Roundabout project | | ||||
Final Project Report--September 2008 [8] (This appeared as a paper in the 2009 ICRA conference) |
|
...
Full Vehicle Experiments (2010 - 2011) - Mike Hafner, Drew Cunningham, Lorenzo Caminiti, and Domitilla Del Vecchio.
This work involved implementing our collision avoidance algorithms, as described in this SIAM article, on-board full size Lexus IS250 test vehicles. Testing was carried out on-site at the Toyota Technical Center, Ann Arbor MI. Some results of this work were presented at the ITS World Congress in Orlando, 2011. The slides and video presented at this conference are provided below.
Video: Intersection collision avoidance application in action
Presentation:
| Widget Connector | ||||
|---|---|---|---|---|
|
...
|