Comment:
Migration of unmigrated content due to installation of a new plugin
...
Deck of Cards
id
bigdeck
Card
label
Method 1: Energy
Wiki Markup
h4.
Method
1:
Energy
{
Toggle Cloak
:
id
=
sys1
} *
System:* {cloak:id=sys1}The object as a [point particle] undergoing [pure rotation].{cloak}
{toggle-cloak:id=int1} *Interaction:* {cloak:id=int1}External forces from the string (tension,
Cloak
id
sys1
The object as a undergoing .
Toggle Cloak
id
int1
Interaction:
Cloak
id
int1
External forces from the string (tension, non-conservative),
the
earth
(gravity,
conservative)
and
the
table
(normal
force,
non-conservative).
{cloak}
{
Toggle Cloak
:
id
=
mod1
} *
Model:
Cloak
id
mod1
plus .
Toggle Cloak
id
app1
Approach:
Cloak
id
app1
Toggle Cloak
id
part1
Consider the Energy
Cloak
id
part1
The table is level, so the gravitational potential energy will be constant. We can set it to zero by taking the height of the tabletop to be zero. The normal force is perpendicular to the motion of the object and so does no work. The only force capable of performing work on the object is the tension, which is equal to the force from the person pulling on the string. Thus, the work done by tension will equal the work done by the person. This work can be computed by finding the change in mechanical energy of the object:
Latex
* {cloak:id=mod1}[Angular Momentum and External Torque about a Single Axis] plus [Mechanical Energy and Non-Conservative Work].{cloak}
{toggle-cloak:id=app1} *Approach:*
{cloak:id=app1}
{toggle-cloak:id=part1} {color:red} *Consider the Energy* {color}
{cloak:id=part1}
The table is level, so the [gravitational potential energy|gravitation (universal)] will be constant. We can set it to zero by taking the height of the tabletop to be zero. The normal force is perpendicular to the motion of the object and so does no work. The only force capable of performing work on the object is the tension, which is equal to the force from the person pulling on the string. Thus, the work done by tension will equal the work done by the person. This work can be computed by finding the change in mechanical energy of the object:
{latex}\begin{large}\[ W^{NC} + E_{i} = E_{f}\]\end{large}{latex}
}\begin{large}\[ K = K_{\rm rot} = \frac{1}{2}I\omega^{2}\]\end{large}{latex}
For
a
point
particle,
{
Latex
}\begin{large}\[ I = mr^{2}\]\end{large}{latex}
and
so:
{
Latex
}\begin{large}\[ W = \frac{1}{2}m\left(r_{f}^{2}\omega_{f}^{2} - r_{i}^{2}\omega_{i}^{2}\right)\]\end{large}{latex}
{warning}Note that we have assumed the mass is constant, but we cannot
Warning
Note that we have assumed the mass is constant, but we cannot assume the angular speed is constant.
Cloak
part1
part1
Toggle Cloak
id
part2
Consider the Angular Momentum
Cloak
id
part2
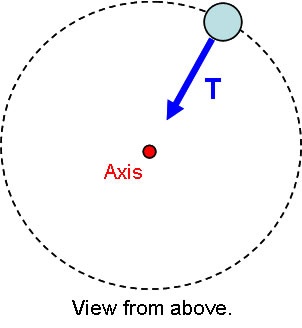
We cannot yet substitute into the equation obtained by considering the object's energy. We do already have the initial and final radius of the motion, but we do not yet have the angular speed. To find it, we consider the torque on the system. We choose the natural location for the axis by locating it at the center of the circle.
Image Added
With this choice, we can see that there is zero net torque on the system, since the moment arm for the tension is zero. With the net torque equal to zero, we are in the special case of constant angular momentum, so:
Latex
assume the angular speed is constant.{warning}
{cloak:part1}
{toggle-cloak:id=part2} {color:red} *Consider the Angular Momentum* {color}
{cloak:id=part2}
We cannot yet substitute into the equation obtained by considering the object's energy. We do already have the initial and final radius of the motion, but we do not yet have the angular speed. To find it, we consider the torque on the system. We choose the natural location for the axis by locating it at the center of the circle.
!puckonstringfbd.jpg!
With this choice, we can see that there is zero net torque on the system, since the [moment arm] for the tension is zero. With the net torque equal to zero, we are in the special case of constant angular momentum, so:
{latex}\begin{large}\[ I_{f}\omega_{f} = I_{i}\omega_{i} \]\end{large}{latex}