You are viewing an old version of this page. View the current version.
Compare with Current
View Page History
« Previous
Version 25
Next »
A common type of kinematics problem involves one person or object catching up to another person or object. Here we illustrate a few typical variations of this problem.
Part A
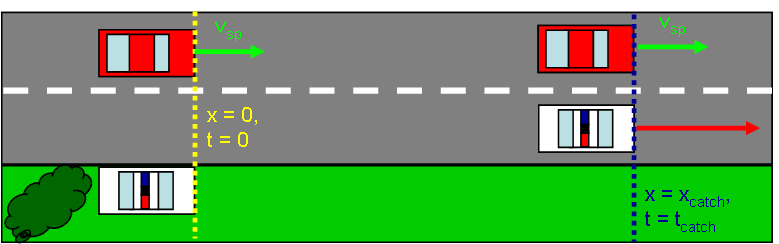
A speeder driving with a constant speed of 24.5 m/s approaches a (hidden) stationary police car on a long, straight road. The police officer detects the speeder using radar, and so the instant the speeder passes the police car, it begins accelerating after the speeder at a rate of 5.00 m/s2. How long will it take for the police car to catch up to the speeder from the instant its acceleration begins?
Solution
Systems:
There are two separate systems here. Both the police car and the speeder's car will be treated as point particles.
Interactions: The police car experiences a constant acceleration as a result of the action of the pavement against its wheels.
Models: The motion of the speeder's car will be modeled as One-Dimensional Motion with Constant Velocity. The motion of the police car will be modeled as One-Dimensional Motion with Constant Acceleration.
Approach:
We will write an expression for the position of each vehicle as a function of time and then set the positions equal to each other. Since we have the freedom to pick our coordinate system, we can help ourselves in this problem by choosing the positive direction to be the direction of motion and setting x = 0 and t=0 at the point when the speeder passes the police car.
The appropriate Law of Change for the speeder is:
Unknown macro: {latex}
\begin
Unknown macro: {large}
[x_
Unknown macro: {rm sp}
= x_
Unknown macro: {rm sp,i}
+ v_
t ] \end
where the subscript "sp" stands for "speeder".
The appropriate Law of Change for the police car is:
Unknown macro: {latex}
\begin
Unknown macro: {large}
[ x_
Unknown macro: {rm pc}
= x_
Unknown macro: {rm pc,i}
+ v_
t + \frac
Unknown macro: {1}
Unknown macro: {2}
a_
t^
Unknown macro: {2}
]\end
where "pc" stands for "police car".
Before setting these equations equal to each other, it is a good idea to substitute the zeros so that we can cancel some of the many terms. In this problem, we have chosen our axis in such a way as to make xsp,i = xpc,i = 0. We also know that vpc,i = 0 because the police car was at rest before the speeder passed it.
Doing this and setting xsp = xpc gives:
Unknown macro: {latex}
\begin
Unknown macro: {large}
[ v_
Unknown macro: {rm sp}
t = \frac
Unknown macro: {1}
Unknown macro: {2}
a_
Unknown macro: {rm pc}
t^
] \end
This is actually a quadratic equation in t, except that the constant term is absent. To be clear, we can rearrange:
Unknown macro: {latex}
\begin
Unknown macro: {large}
[ \frac
Unknown macro: {1}
Unknown macro: {2}
a_
Unknown macro: {rm pc}
t^
- v_
Unknown macro: {rm sp}
t = 0 ] \end
This equation has two roots, which are easily obtained by factoring:
Unknown macro: {latex}
\begin
Unknown macro: {large}
[ t_1 = 0] [ t_
Unknown macro: {2}
= \frac{2 v_{\rm sp}}{a_{\rm pc}} ] \end
We select the second root, since we are interested in the time that the police car catches up to the speeder, not the time that the speeder passes the police car. Thus, we find:
Unknown macro: {latex}
\begin
Unknown macro: {large}
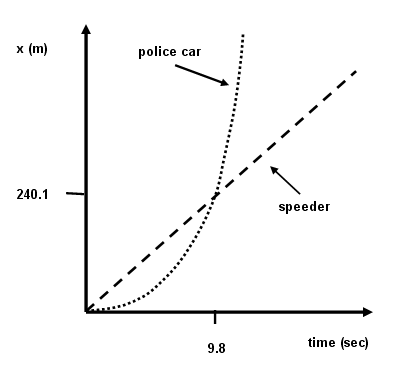
[ t = \frac{2 v_{\rm sp}}{a_{\rm pc}} = 9.8\;
Unknown macro: {rm s}
] \end
One way to help visualize the situation is the plot separately the position of the speeder and of the police car on the same graph of position vs. time
Unknown macro: {latex}
\begin
Unknown macro: {large}
[x_
Unknown macro: {rm sp}
= v_
t]\end
Unknown macro: {latex}
\begin
Unknown macro: {large}
[x_
Unknown macro: {rm pv}
=\frac
Unknown macro: {1}
Unknown macro: {2}
a_
Unknown macro: {rm pc}
t^2]\end
Part B
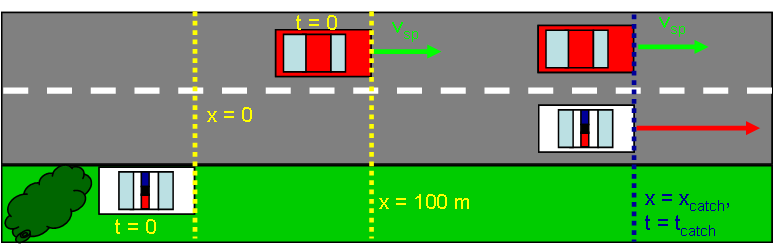
Again, a speeder driving with a constant speed of 24.5 m/s approaches a (hidden) stationary police car on a long, straight road. The police officer detects the speeder using radar, but this time the police officer begins accelerating at a rate of 5.00 m/s2 only after the speeder has progressed 100 m down the road (the speeder has a 100 m head start). How long will it take for the police car to catch up to the speeder from the instant its acceleration begins?
Solution
Systems, Interactions and Models: The same as for Part A.
Approach:
The key difference from Part A is that we can no longer set up our position axis so that both cars are at position x = 0 if we want t=0 to denote the time that the police car begins the chase. Two choices for x=0 are the most common: place it at the speeder's position when the chase begins or place it at the police car's position when the chase begins. We will choose to place x=0 at the police car's position. Then, since the speeder is 100 m ahead, xsp,i = +100 m.
We now follow the same procedure as in Part A, except retaining xsp,i as a non-zero value. This gives:
Unknown macro: {latex} \begin
Unknown macro: {large} [ x_
Unknown macro: {rm sp,i}
+ v_
Unknown macro: {rm sp}
t = \frac
Unknown macro: {1}
Unknown macro: {2} a_
Unknown macro: {rm pc}
t^
] \end
The net result is that we now have a quadratic equation that must be solved via the quadratic equation, rather than by simply factoring out a t. The answer is:
Unknown macro: {latex} \begin
Unknown macro: {large} [t = \frac{v_
Unknown macro: {rm sp} \pm \sqrt{v_
^
Unknown macro: {2}
+2a_
Unknown macro: {rm pc}
\:x_
Unknown macro: {rm sp,i}
}}{a_{\rm pc}}]\end
The plus sign must be chosen to give a time greater than zero, so we find:
Unknown macro: {latex} \begin
Unknown macro: {large} [t=\frac{v_
Unknown macro: {rm sp} +\sqrt{v_
^
Unknown macro: {2}
+2a_
Unknown macro: {rm pc}
\:x_
Unknown macro: {rm sp,i}
}}{a_{\rm pc}} = 12.9\;
Unknown macro: {rm s}
]\end
Unknown macro: {table} Unknown macro: {tr} Unknown macro: {td} [Examples from Kinematics]
Unknown macro: {tr} Unknown macro: {td}
The root page Examples from Kinematics could not be found in space Modeling Applied to Problem Solving.
Unknown macro: {search-box}