

Navy ship lab (Fall 2016) with new tecsis S-force sensor. New force sensor has a smaller range and larger output at lower forces. Lab was run by Timothy Dutton this year. Data looked good at all towing velocities. The setup was not ideal and could use some work in future years.
Where to find things:
- Ship is stored on top of the I-beam in the tow tank
- Navy TA should have the connection plates and bolts
- Tecsis force sensor is stored in the Tow Tank with the other sensors
- Heave plate is stored in the cabinet in the tow tank by the epoxy table
- There are a number of DAQs and power supplies around the tow tank
- 80/20 for setup - there is some in the tow tank, but come in a few weeks early to make sure you have what you need.
Tecsis force sensor:
- range of 25 lbf (25 lbf = 10V signal)
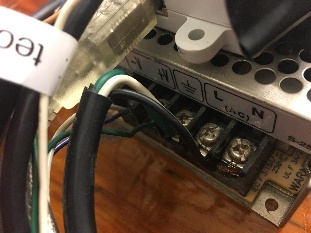
- excitation: 24V, output: 0-10V
- output cable should be labeled; use multimeter to verify correct connections
- datasheets attached
- make sure to generate a calibration curve for the sensor on your own for maximum accuracy
Setup information:
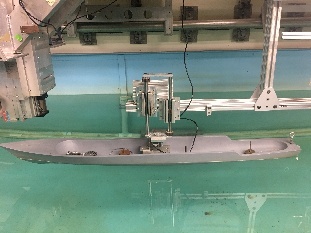
- The ship is free to pitch and heave, but should be rigid yaw and sway. Make sure the ship is rigid in yaw!! If not, when towing, an initial small yaw angle will cause the ship to turn sideways, creating large forces and breaking the force sensor.
- The S-shaped force sensor was attached as shown in the picture. However, this put undue stress on the sensor as the ship heaved and this design should be fixed in future years. The attachment should be constructed with a linear bearing mechanism, so that the sensor only experiences force in the x direction.
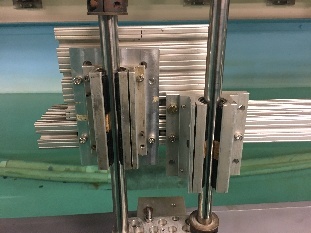
- The two connection plates for the heave plate and the connection plate between the bottom of the heave plate and the force sensor should be re-manufactured. A nut on the back of the connection plates results in a small gap between the 80/20 plate and the connection plate which is not ideal (see pictures). The connecting plate between the heave plate and force sensor should be redesigned to accommodate a linear bearing mechanism, as mentioned.
- DAQ_ship_lab.vi, for collecting data from the DAQ, should be on both the tank control computer and the carriage computer. Also attached. You may need to make some small changes to the code to change where the files are saved, where the program looks for the DAQ (just its name), and which DAQ connections are used. To check if the DAQ is working, you can also use MAX.