Inverted Pendulum Experiemnt
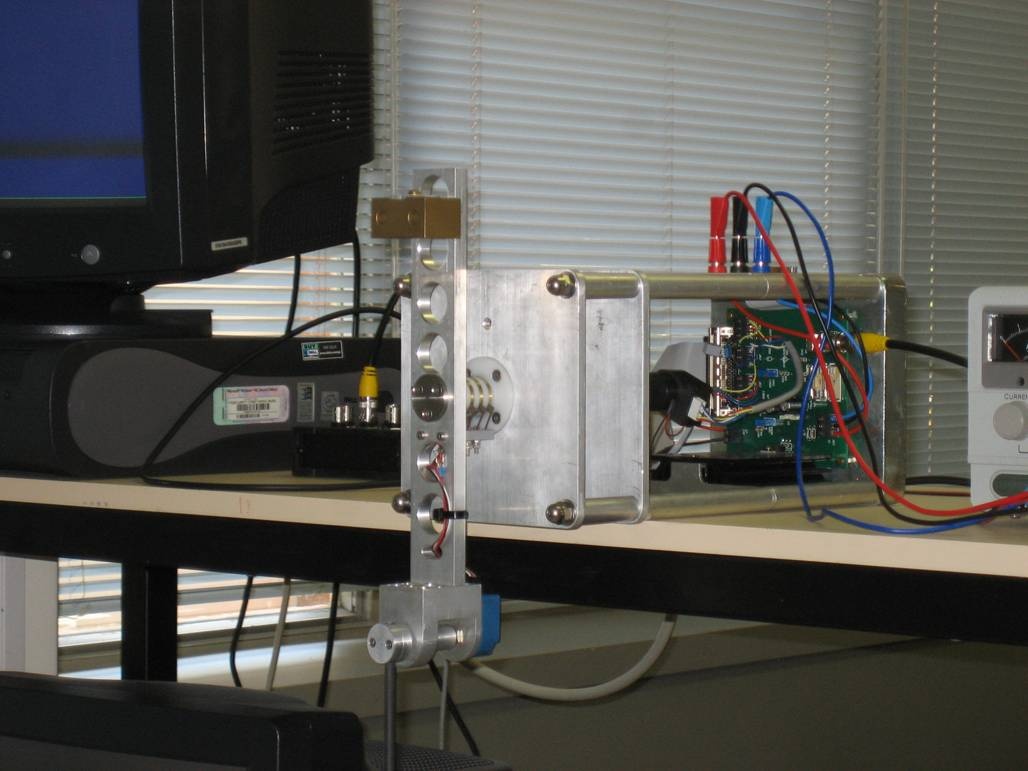
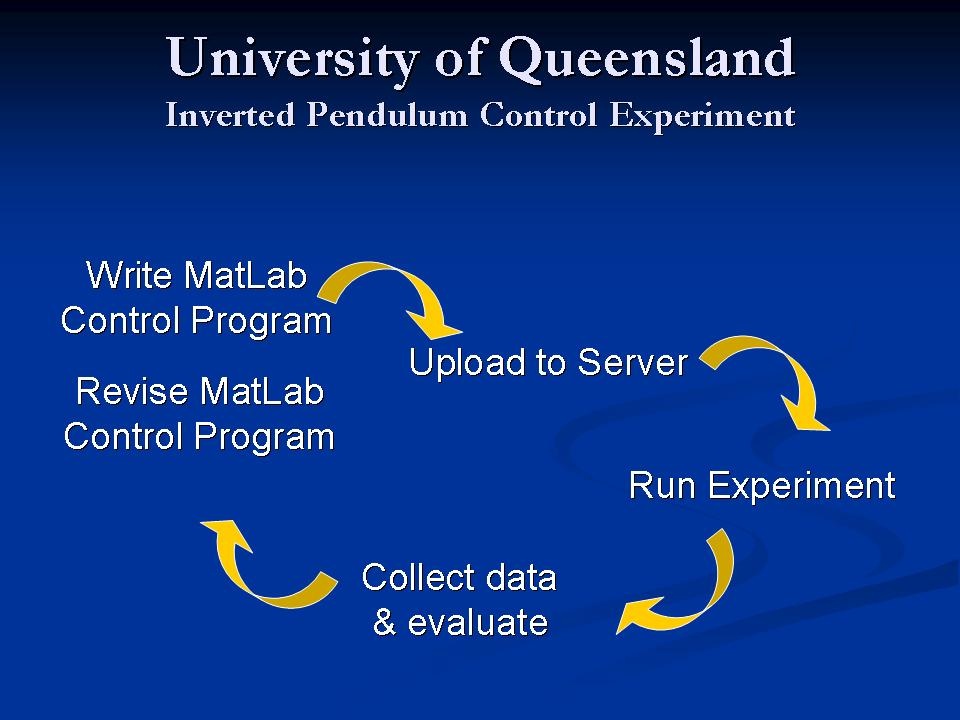
It Inverted Pendulum is a well known control theory experiment where by control laws are derived and tweaked as to balance a pole much like one balances a broom on their finger. This is a difficult practical run over four weeks in the UQ course METR4202 - Advanced Control and Robotics. The students construct models using Simulink within Matlab on their workstation and compile and run their designs on the hardware through connection to a second machine running the xPC kernel. This machine then directly interfaces with the inverted pendulum hardware.
...
— From Joel Carpenter's thesis