Part A
|
Photo by Keith Finlay, courtesy of Wikimedia Commons |

Velodromes are indoor facilities for bicycle racing. Olympic velodromes are usually ovals 250 m in circumference with turns of radius 25 m. The peak banking in the turns is about 42°. Assuming a racer goes through the turn in such a velodrome at the optimal speed so that no friction is required to complete the turn, how fast is the racer moving?
System:
Interactions:
Model:
Approach:
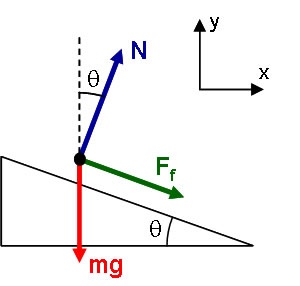
Diagrammatic Representation

Since we are assuming no friction is needed, we have the free body diagram and coordinate system shown above.
Mathematical Representation
The corresponding equations of Newton's Second Law are:
Notice that we have used a true vertical y-axis and true horizontal x-axis. The reason will become clear in a moment.
\begin
[\sum F_
= N \sin\theta][\sum F_
= N \cos\theta - mg = 0 ] \end
The vertical forces cancel out, but the resultant force in the x-direction is not zero
\begin
[\ F_
= \sum F_
= N \sin\theta]\end

This force is directed horizontally inwards toward the center of the curve, causing the bicycle to move in a horizontal circle. We therefore set this resultant Force equal to the force needed to keep the bicycle of mass m moving in a circle of radius r
\begin
[N \sin\theta = \frac{mv^{2}}
]\end
The situation here is very different than that of an object sliding down an inclined plane. In the case of an object moving along the plane, the acceleration will have both x and y components if our untilted coordinates are used. For an object moving along a banked curve, the object will not be moving up or down and so ay must be zero. The x-component of the acceleration will of course not be zero because the object is following the curve. This difference between motion along a banked curve and motion down an inclined plane is the reason we use tilted coordinates for the incline and traditional coordinates for the curve.
It is not appropriate to assume N = mg cosθ. Note that we have not tilted our coordinates to align the x-axis with the ramp. Thus, the y-direction is not perpendicular to the ramp.
From the y-component equation, we find:
\begin
[ N = \frac
]\end
Note both the similarity to the standard inclined plane formula and the important difference.
Substituting into the x-component equation then gives:
\begin
[ v = \sqrt
= 15 \:
= 33 \:
]\end
Is this speed reasonable for a bike race?
Note that our result is independent of the mass of the rider. This is important, since otherwise it would be impractical to construct banked curves. Different people would require different bankings!