Project Sphinx is a propeller-powered VTVL to demonstrate active control of a flight vehicle.

Vehicle Requirements:
- The vehicle shall controllably ascend vertically from the ground to 50 meters above ground level.*
- The vehicle shall perform a successful vertical landing within a 10 meter diameter landing circle.*
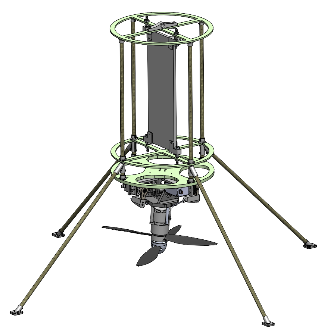
- The vehicle shall use a propeller or set of propellers mounted at the bottom of the vehicle and rotating about a shared axis as the only source of thrust.
- The vehicle shall be fully reusable.
Structures
- Project Sphinx used a custom designed and built carbon-fiber airframe. It used 3D printed couplers to join structural carbon-fiber rods. The avionics bay was made from acrylic and mounted vertically in the vehicle with vibration dampeners. Gimbaling was achieved in Project Sphinx by a custom pushrod mechanism that coupled servo motion with the gimbal angle of the propellers.
Avionics
- Project Sphinx used a custom designed flight computer and auxiliary power board. The flight computer is shown below.

Controls
- Project Sphinx used an active control system to stabilize itself in a nominal upright position and track reference trajectories. A custom MEKF was built to estimate the position and attitude of the vehicle during flight using relatively cheap COTS sensors. A simulation was created to verify the behavior of the controller and estimator. The system performed well in perturbed Monte-Carlo simulations, but due to limited time in the school year, it has never been verified in flight. Attached is a detailed description of the Project Sphinx Controller and Estimator: sphinx.pdf
Testing
- Due to limitations with Sphinx's sensors, the vehicle could only fly outdoors. To build up to a full untethered flight, we constructed a "hangman" structure that allowed us to tether Sphinx during initial tests. With this setup, we could demonstrate controlled hovers and landing maneuvers without risking the vehicle or our own safety. We also decided that even for a full flight, to avoid complications with airspace regulations, we would not fly Sphinx to its designed maximum altitude of 50 meters. Future projects that want to fly to 50 meters or higher must contend with airspace regulations.