Part A
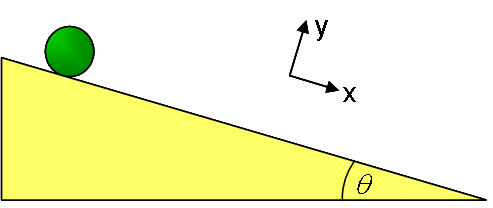
Consider a ball placed on a ramp inclined at θ = 30° above the horizontal. What is the acceleration of the ball's center of mass as it rolls down the ramp? Assume that the ball rolls without slipping.
Solution: We consider two methods.
Method 1
System: The ball is treated as a rigid body subject to external influences from the earth (gravity) and the ramp (friction and normal force).
Model: Point Particle Dynamics and [Angular Momentum and Torque].
Approach: The ball will translate and rotate as it rolls down the slope. The relevant free body diagram is shown below. From this free body diagram we can construct Newton's 2nd Law for the ball's center of mass and also the angular version of Newton's 2nd Law for rotations of the ball about the center of mass.

The x-component of Newton's 2nd Law is:
\begin
[\sum F_
= mg \sin\theta - F_
= ma_
] \end
and the sum of torques about the center of mass is:
\begin
[ \sum \tau = RF_
= I\alpha ] \end
It is not appropriate to assume that the friction force is equal to μFN. The ball is moving, but the point of contact with the ground will remain stationary, and hence we are in the static friction regime.
We can eliminate the friction force from the two equations to find:
\begin
[ mg \sin \theta = ma_
+ I\frac
] \end
Now, because the ball is rolling without slipping, we can relate the angular acceleration to the linear acceleration of the center of mass:
\begin
[ \alpha R = a_
] \end
Substituting this expression allows us to express the acceleration as:
\begin
[ a = \frac
{1 + \frac
{\displaystyle mR^
}} ]\end
Using the result that the moment of inertia for a sphere is 2/5 m R2, we have:
\begin
[ a =\frac
{1+\frac
{\displaystyle 5}} = \frac{5 g \sin(30^
)}
= \mbox
]\end
Note that we have been given no information whatever about the mass or radius of the ball! The acceleration is independent of the mass and the radius.
Method 2
System: The ball as a rigid body subject to external influences from the earth (gravity) and the ramp (normal force and friction).
Model: [Angular Momentum and Torque].
Approach: Instead of writing separate Laws for the translation and rotation, we could instead choose to simply consider the movement as angular momentum about a fixed axis. Since the friction force is unknown, it is best to choose an axis on the surface of the ramp such as the one shown in the picture below.

The torques about this axis will depend upon the position of the ball. When the ball has moved a distance x along the ramp, the torques from gravity and the normal force will be:
\begin
[\sum \tau = mg(x\cos\theta+R \sin \theta) - Nx ] \end
The lever arm for the ball's weight is most easily found using the lever arm.

But, using the fact that the ball is not tranlating in the y-direction, we can derive the standard inclined plane relation:
\begin
[ N = mg\cos\theta]\end
which gives:
\begin
[ \sum \tau = mgR \sin \theta ] \end
We must now find an expression for the angular momentum of the ball. Even though we have not chosen to write separate dynamical equations for the rotation about the center of mass and the translation, the ball's angular momentum will still be composed of these two parts:
\begin
[ L = I_
\omega_
+ \vec
_
\times m \vec
_
= I_
\omega_
+ m v_
R ]\end
Because the ball rolls without slipping, we can relate the angular speed about the center of mass axis to the translational speed of the center of mass:
\begin
[ \omega_
R = v_
] \end
Substituting gives:
\begin
[ L = I_
\frac{v_{\rm cm}}
+ mv_
R ] \end
We now set the time derivative of the angular momentum equal to the sum of the torques, giving:
\begin
[ \left(\frac{I_{\rm cm}}
+ mR\right)a = mgR\sin\theta ] \end
so that we find:
\begin
[ a = \frac
{1 + \frac
{\displaystyle mR^
}} ] \end