|
Introduction to the ModelDescription and AssumptionsThis model applies to a rigid body which is executing pure rotation confined to the xy plane about the origin. Learning ObjectivesStudents will be assumed to understand this model who can:
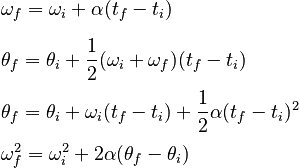
Relevant DefinitionsRelationship between Angular and Tangential Quantities 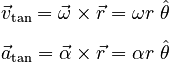 Centripetal Acceleration 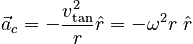 Magnitude of Total Acceleration  By definition, every point in an object undergoing pure rotation will have the same value for all angular quantities (θ, ω, α). The linear quantities (r, v, a), however, will vary with position in the object. S.I.M. Structure of the ModelCompatible SystemsThis model applied to a single rigid body or to a single point particle constrained to move in a circular path. Relevant InteractionsThe system will be subject to a position-dependent centripetal acceleration, and may also be subject to an angular (or equivalently, tangential) acceleration. Laws of ChangeMathematical RepresentationDifferential Form 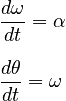 Integral Form 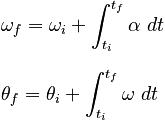 Note the analogy between these Laws of Change and those of the One-Dimensional Motion (General) model. Thus, for the case of constant angular acceleration, the integral form of these Laws are equivalent to:
 Diagrammatic Representations
Relevant ExamplesAll Examples Using the Model
|
Overview
Content Tools
Activity