Part A
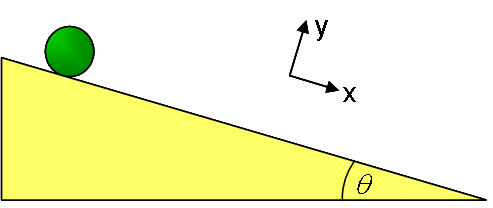
Consider a ball placed on a ramp inclined at θ = 30° above the horizontal. What is the acceleration of the ball's center of mass as it rolls down the ramp? Assume that the ball rolls without slipping.
Solution: We consider two methods.
Method 1
System: The ball is treated as a rigid body subject to external influences from the earth (gravity) and the ramp (friction and normal force).
Model: [Rotation and Translation of a Rigid Body]
Approach: The ball will translate and rotate as it rolls down the slope. The relevant free body diagram is shown below. From this free body diagram we can construct Newton's 2nd Law for the ball's center of mass and also the angular version of Newton's 2nd Law for rotations of the ball about the center of mass.

The x-component of Newton's 2nd Law is:
\begin
[\sum F_
= mg \sin\theta - F_
= ma_
] \end
and the sum of torques about the center of mass is:
\begin
[ \sum \tau = RF_
= I\alpha ] \end
It is not appropriate to assume that the friction force is equal to μFN. The ball is moving, but the point of contact with the ground will remain stationary, and hence we are in the static friction regime.
We can eliminate the friction force from the two equations to find:
\begin
[ mg \sin \theta = ma_
+ I\frac
] \end
Now, because the ball is rolling without slipping, we can relate the angular acceleration to the linear acceleration of the center of mass:
\begin
[ \alpha R = a_
] \end
Substituting this expression allows us to express the acceleration as:
\begin
[ a = \frac
{1 + \frac
{\displaystyle mR^
}} ]\end
Using the result that the moment of inertia for a sphere is 2/5 m R2, we have:
\begin
[ a =\frac
{1+\frac
{\displaystyle 5}} = \frac{5 g \sin(30^
)}
= \mbox
]\end
Note that we have been given no information whatever about the mass or radius of the ball! The acceleration is independent of the mass and the radius.
Method 2
System: The ball as a rigid body subject to external influences from the earth (gravity) and the ramp (normal force and friction).
Model: [1-D Angular Momentum and Angular Impulse].
Approach: Instead of writing separate Laws for the translation and rotation, we could instead choose to simply consider the movement as angular momentum about a fixed axis. Since the friction force is unknown, it is best to choose an axis on the surface of the ramp such as the one shown in the picture below.

The torques about this axis will depend upon the position of the ball. When the ball has moved a distance x along the ramp, the torques from gravity and the normal force will be:
\begin
[\sum \tau = mg(x\cos\theta+R \sin \theta) - Nx ] \end
The expression for the torque due to the ball's weight is most easily found using the lever arm.

But, using the fact that the ball is not tranlating in the y-direction, we can derive the standard inclined plane relation:
\begin
[ N = mg\cos\theta]\end
which gives:
\begin
[ \sum \tau = mgR \sin \theta ] \end
We must now find an expression for the angular momentum of the ball. Even though we have not chosen to write separate dynamical equations for the rotation about the center of mass and the translation, the ball's angular momentum will still be composed of these two parts:
\begin
[ L = I_
\omega_
+ \vec
_
\times m \vec
_
= I_
\omega_
+ m v_
R ]\end
Because the ball rolls without slipping, we can relate the angular speed about the center of mass axis to the translational speed of the center of mass:
\begin
[ \omega_
R = v_
] \end
Substituting gives:
\begin
[ L = I_
\frac{v_{\rm cm}}
+ mv_
R ] \end
We now set the time derivative of the angular momentum equal to the sum of the torques, giving:
\begin
[ \left(\frac{I_{\rm cm}}
+ mR\right)a = mgR\sin\theta ] \end
so that we find:
\begin
[ a = \frac
{1 + \frac
{\displaystyle mR^
}} ] \end
Part B
Assuming the ball is released from rest, what is the speed of the ball's center of mass after it has moved 1.3 m along the ramp?
Solution: Once again, we solve the problem using two different methods.
Method 1
System and Models: As in Part A, plus One-Dimensional Motion with Constant Acceleration.
Approach: After using one of the methods described in Part A to determine the acceleration, we can use kinematics to find the speed. The most direct approach is to use:
\begin
[ v_
^
= v_{x,{\rm i}}^
+ 2 a_
(x-x_
) ]\end
where we choose xi = 0 m. Solving gives:
\begin
[ v_
= \pm \sqrt{2a_
x } = \pm \sqrt{\frac
{1+\frac
{\displaystyle mR^{2}}}} ] \end
we choose the plus sign, since the ball is translating in the + x direction. Since the y-velocity is zero, the total speed of the ball's center of mass is:
\begin
[ v = \mbox
] \end
Method 2
System: The ball plus the earth and ramp. There are internal gravity, normal and friction forces.
Model: [Mechanical Energy and Non-Conservative Work].
Approach: Another way to solve the problem is to use energy. It turns out that in this problem, the mechanical energy of the ball will be constant. This assertion requires justification. The forces present in the system are gravity, normal force and friction. Gravity is a conservative force. The normal force is non-conservative, but it does no work because it is perpendicular to the motion of the object. Friction, however, is both non-conservative and directed anti-parallel to the motion of the ball, and so it should clearly do work. The reason we can assume the energy is constant is the problem's statement that the ball rolls without slipping. This means that the friction is static rather than kinetic. Kinetic friction converts mechanical energy into thermal energy and so it is not appropriate to use conservation of mechanical energy when kinetic friction is present. The work done by static friction, however, does not convert mechanical energy into thermal energy. Instead, the static friction acts to divert some of the lost potential energy into rotational kinetic energy (rather than simply translational kinetic energy). Thus, all of the energy remains in a mechanical form.
With this realization, we can write the equation of mechanical energy conservation in the form:
\begin
[ K_
+ K_
+ U_
= K_
+ K_
+ U_
]\end
If we select h = 0 at the point of release of the ball, then by the time the ball has moved a distance x along the ramp, it has reached a height:
\begin
[ h = - x \sin\theta]\end
Substituting zeros and appropriate expressions into the conservation of energy formula gives:
\begin
[ \frac
mv_
^
+ \frac
I\omega_
^
- mgx\sin\theta = 0 ] \end
Finally, the assumption that the ball is rolling without slipping implies the relationship:
\begin
[ \omega_
R = v_
]\end
so:
\begin
[ v_
= \sqrt{\frac
{1+\frac
{\displaystyle mR^{2}}}} ] \end
The same result as obtained with method 1.
Looking back at the equations of Part A, method 1 you can see that the friction force is:
[ F_
= I\alpha /R ]
We know the value of α from Part A. Thus, using the fact that the work done by friction when the ball moves a distance x down the ramp is W = – xFf we can write:
[ W = - \frac
{R^{2}} \frac
{1+\frac
{\displaystyle mR^
}} ]
Now, using our result for vf, we can write this as:
[ W = - \frac
I \frac{v_
{2}}{R{2}} = - \frac
I\omega_
^
= - K_
]
Thus, the work done by friction is exactly equal to the rotational kinetic energy acquired by the ball.